机构名称:
¥ 1.0
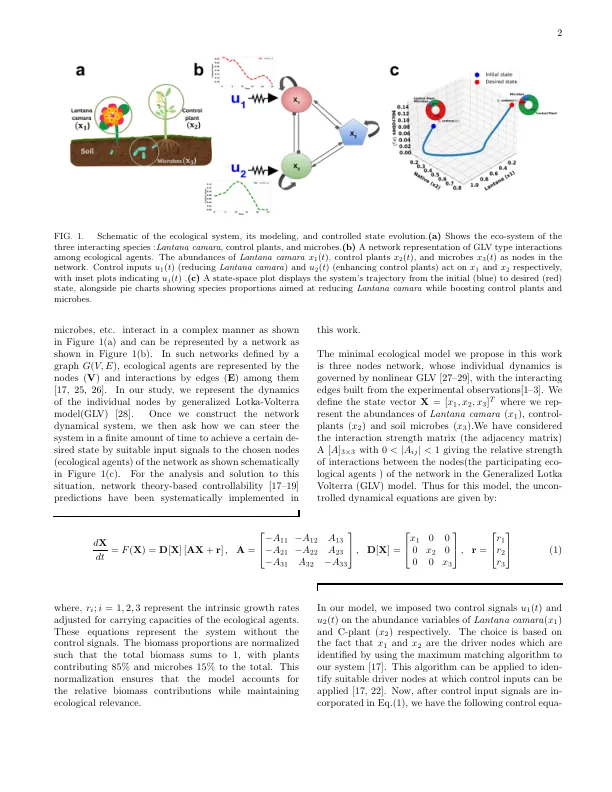
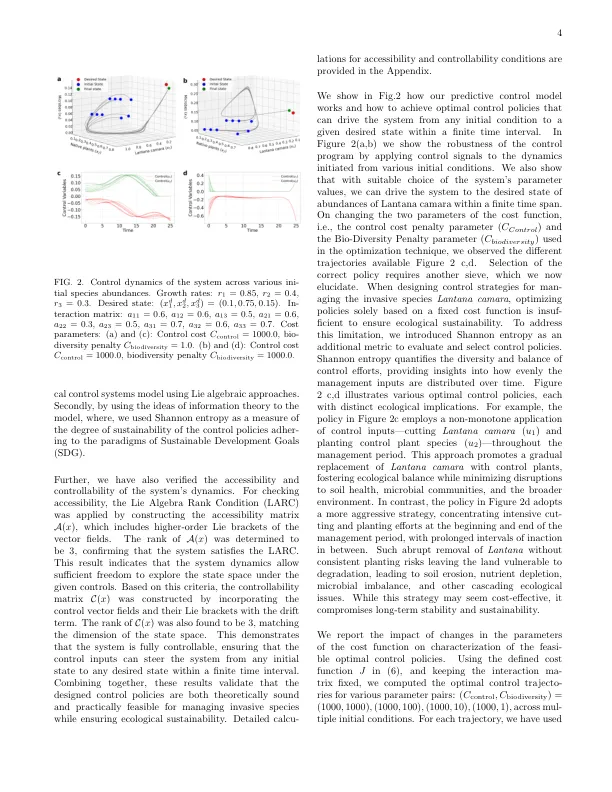
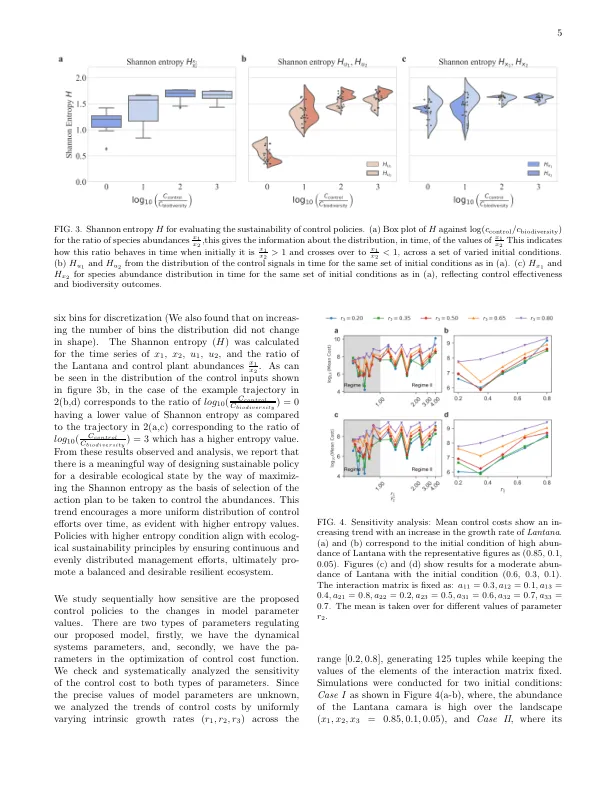
制定控制政策,以减轻侵入性植物对可持续发展目标(SDG)框架内土著生物多样性的影响是这项工作的主要目标。使用报道的入侵物种Lantana Camara的生态动力学,我们开发了一个最小的三种网络模型,每个节点都遵循广义的Lotka-Volterra(GLV)动态方程。采用Lie代数和网络控制理论,我们建立了模型的可访问性和可访问性标准。通过非线性优化编程,我们得出了可持续的政策,以控制Lantana Camara的丰富性。我们还使用香农熵作为评估这些最佳政策的可持续性的指标。使用该技术测量的灵敏度的分析表明,控制策略在严重取决于Lantana Camara和控制厂的内在生长速率之比。因此,我们获得了一种模块化算法决策支持机制,用于设计控制Lantana Camara丰度的控制政策。
covid- ...
主要关键词


相关文件推荐